Raspberry PiでSPG20-1332を回す
2012.12.14 · 501 words · 1 minute read
Raspberry Piで秋月電子で売っている安いステッピングモーター(コパル製 SPG20-1332)を回す。
以前、Arduinoで二相励磁駆動させたものをRaspberry Piでやってみました。
回路は以下の様な感じで。
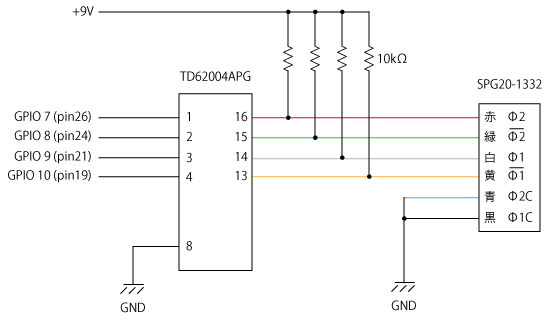
Raspberry PiのI/Oは3.3V系なので、トランジスタアレイ(TD62004APG)を入れてレベルシフトしています。
#include <stdio.h>
int main()
{
int i;
system("echo "7" > /sys/class/gpio/export");
system("echo "8" > /sys/class/gpio/export");
system("echo "9" > /sys/class/gpio/export");
system("echo "10" > /sys/class/gpio/export");
system("echo "out" > /sys/class/gpio/gpio7/direction");
system("echo "out" > /sys/class/gpio/gpio8/direction");
system("echo "out" > /sys/class/gpio/gpio9/direction");
system("echo "out" > /sys/class/gpio/gpio10/direction");
for (i=0; i<360; i++) {
system("echo "1" > /sys/class/gpio/gpio7/value");
system("echo "1" > /sys/class/gpio/gpio8/value");
system("echo "0" > /sys/class/gpio/gpio7/value");
system("echo "1" > /sys/class/gpio/gpio8/value");
system("echo "1" > /sys/class/gpio/gpio9/value");
system("echo "0" > /sys/class/gpio/gpio8/value");
system("echo "1" > /sys/class/gpio/gpio9/value");
system("echo "1" > /sys/class/gpio/gpio10/value");
system("echo "0" > /sys/class/gpio/gpio9/value");
system("echo "1" > /sys/class/gpio/gpio10/value");
system("echo "1" > /sys/class/gpio/gpio7/value");
system("echo "0" > /sys/class/gpio/gpio10/value");
}
system("echo "7" > /sys/class/gpio/unexport");
system("echo "8" > /sys/class/gpio/unexport");
system("echo "9" > /sys/class/gpio/unexport");
system("echo "10" > /sys/class/gpio/unexport");
}
480ステップで1回転なので、120回ループしてあげれば1回転、上記では360回ループなので3回転します。
とりあえず動かすだけなので、system関数でシェルを呼び出す感じのへたれコード。
本格的に使うならレジスタを直で叩く方が良いと思います。(速度的に雲泥の差)
追記:PythonでRPi.GPIOを利用して上記をそっくりそのまま写すならこんな感じかな?(未検証)
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(7,GPIO.OUT)
GPIO.setup(8,GPIO.OUT)
GPIO.setup(9,GPIO.OUT)
GPIO.setup(10,GPIO.OUT)
for i in range(0,360):
GPIO.output(7,GPIO.HIGH)
GPIO.output(8,GPIO.HIGH)
GPIO.output(7,GPIO.LOW)
GPIO.output(8,GPIO.HIGH)
GPIO.output(9,GPIO.HIGH)
GPIO.output(8,GPIO.LOW)
GPIO.output(9,GPIO.HIGH)
GPIO.output(10,GPIO.HIGH)
GPIO.output(9,GPIO.LOW)
GPIO.output(10,GPIO.HIGH)
GPIO.output(7,GPIO.HIGH)
GPIO.output(10,GPIO.LOW)
GPIO.cleanup()
ループ部分は以前の記事に近い形で書き直せるはず。(放置)